En 1992, un jeu d’un nouveau genre est apparu sur nos écrans. Un jeu que l’on pourrait qualifier de jeu « Online visiophonique » !
Le principe de l’émission était simple, un jeu vidéo pour attirer les geeks en herbe et une présentatrice sympathique (la très sexy Karen Cheryl) pour faire grimper un peu plus l’audience.
Dans sa première version, le principe du jeu est plutôt basique, il s’agit de diriger le personnage via les touches 4 et 6 de son téléphone. Nous allons donc voir comment recréer facilement ce système de contrôle. Cette émission se nommait « Hugo Délire ».
Karen
Comment ça marche ?
Grace au DTMF (non ce n’est pas la dernière insulte à la mode mais plutôt l’abréviation de dual-tone multi-frequency ou fréquences vocales pour les français), on peut savoir sur quelle touche la personne appuie en fonction de la fréquence sonore et diriger ainsi le personnage en fonction.

DTMF
Mise en oeuvre
Il faut :
1 – Arduino UNO.
1 – Décodeur DTMF MT8870 .
1 – Ligne téléphonique avec un téléphone.
1 – Un PC avec le jeux Hugo et l’émulateur qui va bien (le jeux original tournait sur Amiga mais par souci de facilité j’ai utilisé la version PS1).
On connecte donc l’écouteur du téléphone au décodeur DTMF qui lui même est connecté à l’Arduino qui est lui même connecté au PC.

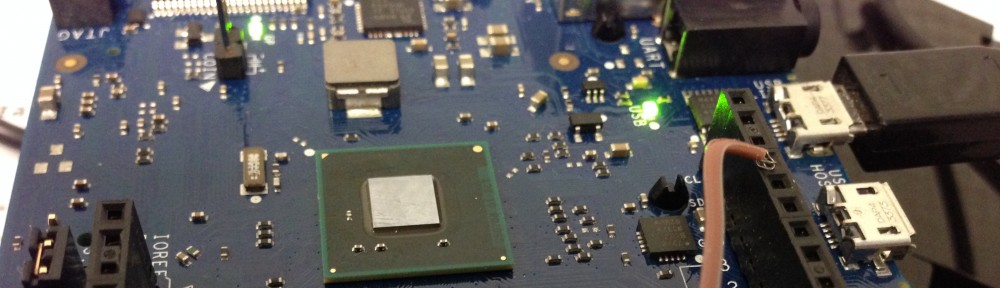
Montage
On relie donc :
– L’écouteur du téléphone au module DTMF via une prise jack (n’ayant pas de ligne fixe j’ai utilisé un portable, l’Iphone de droite).
– Le module DTMF a l’Arduino (STQ -> 5, les pins 1,2,3,4 vers leur homologues sur .l’arduino)
– l’Arduino en USB au PC

Setup
Voici le lien vers le code Arduino qui utilise UnoJoy pour que l’arduino soit reconnu comme un Joystick afin de l’utiliser dans l’émulateur.
Il ne reste plus qu’a lancer le jeu, appeler la ligne téléphonique en question et jouer 🙂